TRINAMIC代理商 步进电机驱动 驱动IC 深圳市智联微电子有限公司
TRINAMIC代理商 步进电机驱动 驱动IC 深圳市智联微电子有限公司直流无刷电机(BLDC)集成了霍尔传感器,是基于FOC的闭环操作。在工业领域涉及到大电流、大功率,有没有较好的电机控制方案呢?据了解,目前很多工业级的电机都是使用直流无刷电机,而要控制直流无刷电机,方法也有很多,为了方便快捷,Trinamic是否也有快速、高效的解决方案呢?
以往的方式,会采用某种控制卡,通过自己编写或是定制一套算法,然后连接控制芯片使用。为了控制电机转动方向及电机转动位置,直流无刷电机采用霍尔传感器记录位置,再将信号发送给控制芯片,除了精度差以外,通过软件算法提供的支持,基本满足电机控制的所有要求。而这个方案也有不少缺点,如前期需要较多的时间去钻研算法,同时控制卡体积大,成本也较高。
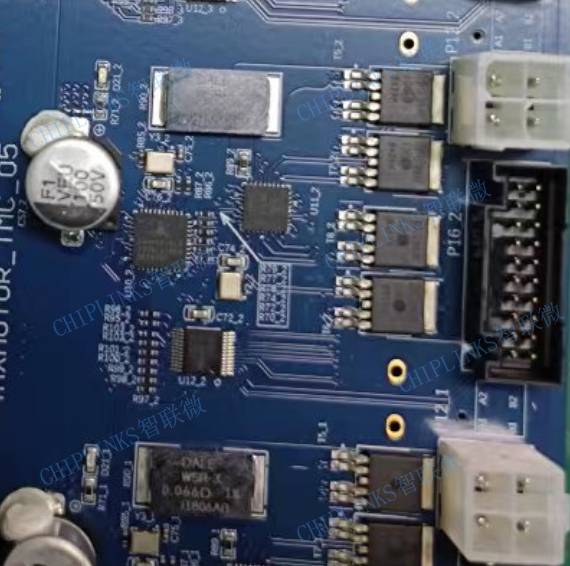
而Trinamic作为全球嵌入式运动控制领导企业,对于BLDC电机推出的控制方案中,采用的是TMC4671+TMC6100,其中TMC4671是带FOC的算法芯片,具有转矩控制 (FOC)、速度控制和位置控制;而TMC6100是三相BLDC预驱芯片,这套方案支持大功率的电机运动控制,具有更精密、精确、高效的解决方法。这套方案在国内并没有大力推广,造成目前国内企业对于使用该套方案的依旧是少数。
随着缺芯潮来临,这个方案也得到越来越多的工业客户认可,并且自主设计新的板子及开发新的软件控制程序,来满足更高要求的、更高精度的运动控制。
如果使用Trinamic的解决方案,如何实现高效的定位呢?会给BLDC电机的控制带来哪些解决方式呢?
无刷直流电机带霍尔传感器,如何调速?
通过脉冲方向调节频率来调节速度的。我们需要设置芯片的频率,正常驱动芯片的频率是25KHZ,显然这个精度是足够了,毕竟是霍尔的传感器,本身精度就不高,所以频率设置再高也没的什么用。
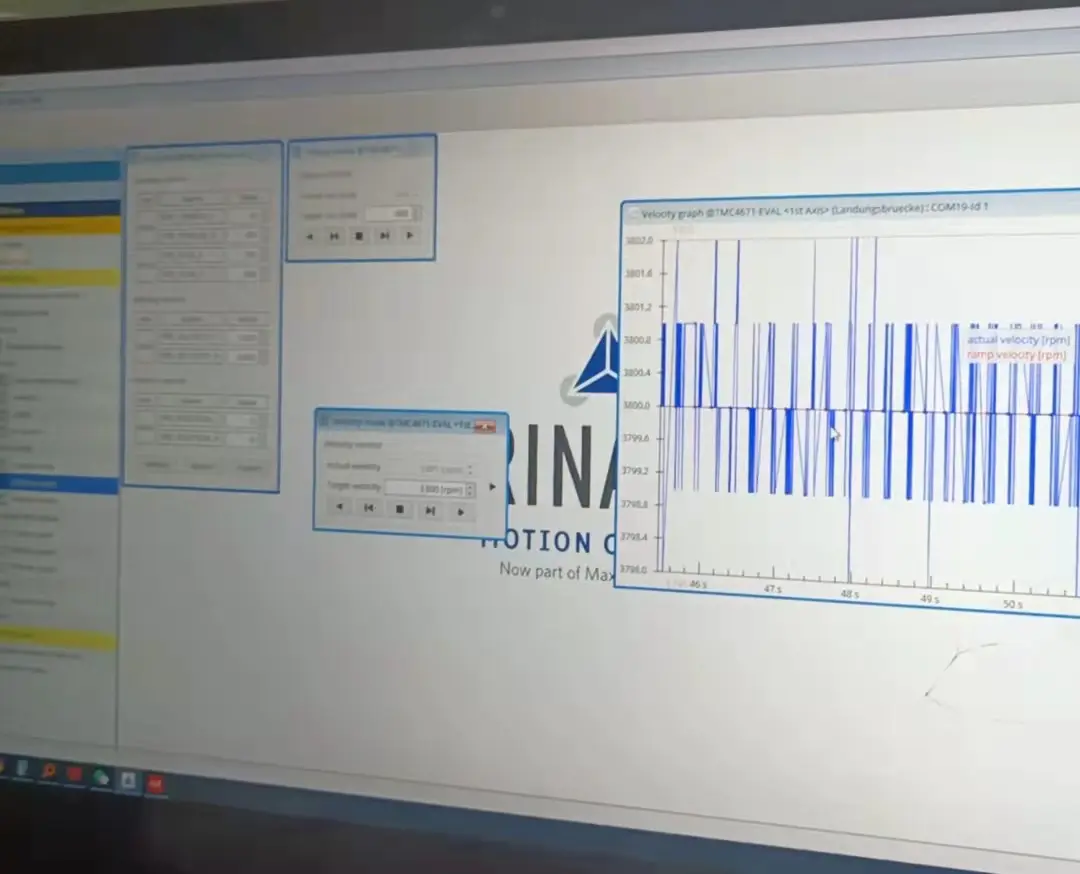
通过频率调速时,根据设置的脉冲方向,随着脉冲频率的高低,就能实现电机的快慢。
直流无刷电机精度设置
需要调一个寄存器,寄存器默认是0,0代表的意思是不使用脉冲方向,当设置为1时,就是输入一个脉冲,电机走一个位置,当设置为2时,就是输入两个脉冲,走一个位置。
直流无刷电机在运动过程中,如何控制它的距离及位置呢?
霍尔传感器本身就没有精度可言,一圈一共才6个位置,本身精度就非常低,通过编码器,使用SPI直接来发位置数即可。电机运动的快慢、停止、位置都可以用SPI发数值来改变它。
不足之处
使用TMC4671+TMC6100方案,不支持绝对式编码器,需要通过MCU中转,输出绝对值。
TMC4671是硬件FOC算法,通过SPI配置寄存器即可。虽然解决了硬件部分的驱动方案,但依旧要得到软件工程师的支持,特别是项目已经有一套算法时,需要放弃该算法来重新制定一套新的算法来满足这套驱动程序,给软件工程师带来一定的工作量。
Trinamic带来的解决方案
精度高,提升性能
体积小,节省空间
自带算法,设计新项目可减少很多大工作量
成本控制,Trinamic芯片供应稳定
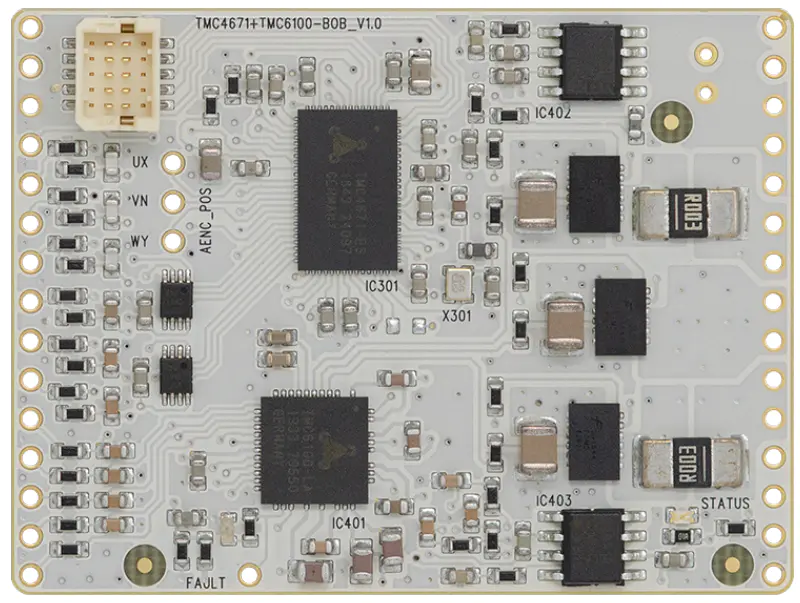
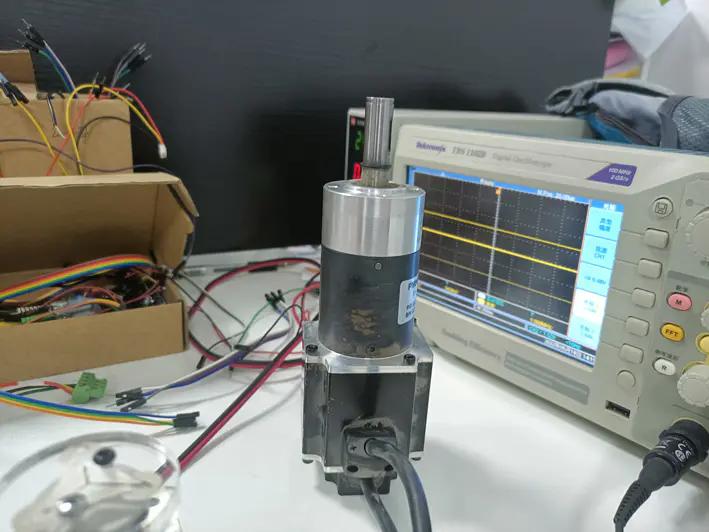
Trinamic对于直流无刷电机的控制方案未来也必将成为一种趋势。目前TMC4671+TMC6100方案,广泛用于电动遥控汽车、医疗设备、实验室自动化、机器人、机器手臂、工厂自动化以及泵和鼓风机等设计项目。同时也希望该领域的工程师们给予我们宝贵意见,对集成芯片进行了仔细评估和改进。可以使用以上评估板,对您的项目进行改进及升级测试。